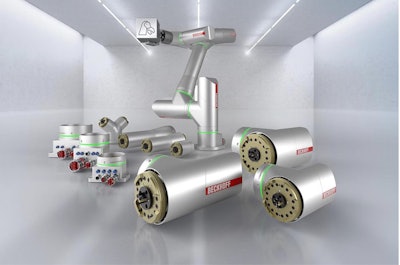
Numerosas tecnologías robóticas nuevas han debutado en las últimas dos décadas, pero el nuevo sistema ATRO de Beckhoff puede ser una de las primeras tecnologías robóticas modulares de bricolaje (hágalo usted mismo) para el mercado industrial. El sistema ATRO (Automation Technology for Robotics) es un sistema de robot industrial modular que permite a los usuarios finales, integradores y fabricantes de máquinas crear una configuración de robot óptima para su aplicación.El sistema se compone de módulos de motor estandarizados con funcionalidad de accionamiento integrada, módulos de enlace de varios diseños y longitudes y la plataforma de control TwinCAT.
 Configuración de robot delta de 3 ejes con ATRO.Foto cortesía de Beckhoff
Configuración de robot delta de 3 ejes con ATRO.Foto cortesía de Beckhoff
Con estos componentes, los usuarios pueden crear sistemas robóticos que van desde mesas de indexación giratorias de 1 eje y robots delta de 3 ejes hasta robots articulados de 6 y 7 ejes.Beckhoff señala que todos los módulos ATRO cuentan con una fuente de medios interna para datos, energía y fluidos (vacío, aire y agua). Esto permite que ATRO utilice una variedad de herramientas, como pinzas mecánicas, neumáticas o eléctricas. Debido a que estas fuentes de medios son internas, permite una rotación sin fin de los ejes ATRO y las herramientas del efector final, ya que no hay cables externos que obstaculicen el rango de movimiento del robot.Además, el sistema ATRO se basa en una arquitectura de control abierta, lo que le permite conectarse a "todas las interfaces imaginables en la comunicación de la célula/planta, como Profinet, EtherNet/IP, OPC UA o la nube", dice Beckhoff.
Además, el sistema ATRO permite que todas las funciones, como robótica, visión, seguridad y aprendizaje automático, se integren en una única plataforma de control.Si se pregunta si el ATRO es un robot industrial o un cobot, Beckhoff dice que el ATRO es un robot industrial que puede ejecutar comandos TwinSafe Motion como: Velocidad limitada segura (SLS), donde la velocidad del robot se limita de manera segura a una velocidad específica ventana; Parada de operación segura (SOS) donde el accionamiento del robot se monitorea de manera segura en una posición particular; Parada segura 2 (SS2), donde el accionamiento del robot se reduce hasta detenerse y permanece controlado de forma segura en el modo de parada; y Safe Torque Off (STO), donde toda la energía generadora de par al robot se corta inmediatamente.Antes de profundizar en los detalles de ATRO, se debe tener en cuenta que esta es una presentación previa temprana de ATRO. La tecnología aún no está disponible para su compra.
Capacidades y módulos de ATRO
El sistema ATRO puede manejar capacidades de carga útil que van desde 3 kg a 10 kg con un alcance de 0,6 metros a 1,3 metros. La información sobre las velocidades de los robots ATRO aún no se ha publicado, pero Matt Prellwitz, gerente de productos de tecnología de accionamiento en Beckhoff Automation, dice que Beckhoff planea lanzar kits ATRO para la creación de robots en serie de 6 ejes a finales de este año. En ese momento, se dará a conocer la información sobre las velocidades de los robots.Beckhoff dice que toda la electrónica necesaria para controlar los ejes está integrada en los módulos de motor ATRO, incluido un servoinversor basado en EtherCAT, un freno y una caja de cambios compacta. Con estas características integradas, el controlador de robot solo requiere una unidad de control básica.
Alternativamente, el ATRO se puede integrar en un sistema de control de máquina existente.Los módulos de motor ATRO estarán disponibles en tres diseños: módulos de motor L y T para usar como juntas angulares de 90 grados y módulos de motor I rectos creados para reducir el tamaño de la brida.La longitud de los módulos de enlace ATRO varía y están disponibles en forma de I, forma de L, forma de T y forma de Y.
La base del robot ATRO puede montarse en el suelo, la pared o el techo. La conexión al alimentador de medios interno se puede realizar desde el costado o desde la parte inferior de la unidad base.Independientemente del tipo de estructura de robot creada, el conjunto resultante es escaneado por el sistema de control, lo que permite que las funciones de robótica TwinCAT integradas creen automáticamente la aplicación de control correspondiente, incluido un gemelo digital.
Montaje DIY
Más allá de su configuración de diseño personalizable, otros dos aspectos interesantes de ATRO son su montaje y los refuerzos visuales que proporciona al montador y al usuario de que cada módulo está correctamente conectado y listo para funcionar.El ensamblaje de un robot ATRO se logra utilizando un método similar a un anillo deslizante para conectar cada módulo y una herramienta ajustable para asegurar la unión en su lugar.“A través de este sencillo proceso de ensamblaje, toda la energía, la comunicación y los fluidos se enrutan internamente mediante un método innovador que permite la rotación continua”, dice Prellwitz.
 Matt Prellwitz, gerente de productos de tecnología de accionamiento en Beckhoff Automation.
Matt Prellwitz, gerente de productos de tecnología de accionamiento en Beckhoff Automation.
“El robot nunca necesita detenerse para desenrollar un cable de aire comprimido, por ejemplo. Como tal, los usuarios ahorran tiempo no solo durante la puesta en marcha, sino también durante la producción”.A medida que se conecta cada módulo, se ilumina una luz que recubre la conexión conjunta. Cuando la luz es amarilla, se ha verificado que la comunicación EtherCAT entre módulos es efectiva; una luz verde indica que el módulo está listo para funcionar; y una luz azul indica que la unidad está lista para el modo de aprendizaje manual.Con respecto a las aplicaciones específicas para las que ATRO es más adecuado, Prellwitz dice que “ATRO se puede agregar a cualquier aplicación, y el diseño flexible ayuda a los usuarios a adaptar fácilmente el sistema a los diseños de máquinas nuevas y existentes. Las aplicaciones comunes incluyen ensamblaje, manejo de materiales, automatización de laboratorio y empaque”.
Función de integración de EtherCAT
La arquitectura abierta del sistema ATRO permite la interfaz con otros sistemas de robots existentes en una planta a través de EtherCAT. Prellwitz explica que KUKA ofrece integración EtherCAT en toda su cartera de robots. “KUKA también ofrece robots a prueba de fallas sobre EtherCAT (FSoE), para que los usuarios puedan pasar datos de seguridad del sistema de robot al sistema de automatización TwinCAT”, dice. “Stäubli también utiliza EtherCAT a través de su portafolio de robots y les permite a los usuarios conectar módulos de E/S EtherCAT, como cajas de E/S montables en robots y máquinas o E/S con clasificación IP20 para gabinetes. Y Denso utiliza la comunicación EtherCAT en nuevos robots para permitir la integración de servoaccionamientos EtherCAT y E/S EtherCAT.
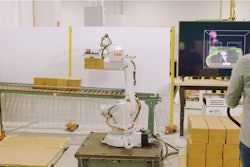
 Robot ATRO articulado de 5 ejes para aplicaciones de paletizado.Foto cortesía de Beckhoff
Robot ATRO articulado de 5 ejes para aplicaciones de paletizado.Foto cortesía de Beckhoff
Por ejemplo, la nueva plataforma de control RC9 de Denso utiliza redes EtherCAT y terminales de E/S conectables de la serie EJ de Beckhoff, con una PC industrial de Beckhoff como hardware del controlador”. Prellwitz agrega que numerosos proveedores de unidades prefieren usar EtherCAT para "integrar sus unidades sobre cualquier otro bus de campo abierto". Las razones de esta preferencia se basan en gran medida en la alta velocidad, el gran ancho de banda y la capacidad de EtherCAT para ofrecer un rendimiento máximo en términos de velocidad, posición y par. “La comunicación determinista juega un papel muy importante en el control de movimiento, ya que el envío determinista de comandos conjuntos a un robot permite un control de movimiento más fluido en comparación con otros buses de campo”, dice Prellwitz.EtherCAT también permite la integración de E/S, ejes de alimentación y/o la interfaz ATRO, de modo que las pinzas estándar de diferentes fabricantes se pueden conectar a través de placas adaptadoras.
El uso de TwinCAT como software de programación para ATRO permite a los usuarios desarrollar proyectos XPlanar y XTS en el mismo entorno. Prellwitz dice: "Esto le permite integrar fácilmente estas tecnologías de transporte avanzadas, así como componentes básicos como palets con contenedores de almacenamiento o transportadores simples".