En 1978, The Car Wash Factory de Sonny comenzó como fabricante de piezas pequeñas con la misión de "Facilitar el lavado de carros" para los propietarios y operadores de lavados de automóviles, y convertirse en el líder mundial de la industria. Sonny's es ahora el mayor fabricante de equipos de lavado de autos con cinta transportadora y ofrece 12 soluciones comerciales de lavado de autos como la ventanilla única para todas las necesidades de lavado de autos. Sonny’s adquirió negocios complementarios estratégicamente, incluido Diamond Shine, con sede en Cleveland, líder de la industria en limpiadores y solventes de primera calidad.
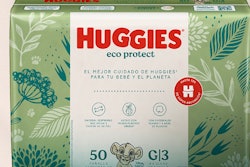
La línea Bullseye™ de Diamond Shine de detergentes y ceras para lavado de autos comerciales de alcance industrial es un poco más potente que los cubos de espuma con los que trabajan los guerreros de fin de semana mientras lavan sus autos en el camino de llegada. La mayor diferencia es que estos son productos químicos concentrados destinados a medirse cuidadosamente y diluirse en agua, no se usan directamente de la botella. Con 2,5 galones, estas botellas estilo F están claramente divididas para uso comercial. Una vez en manos del profesional de lavado de autos, las botellas rígidas de HDPE con asa integral están diseñadas específicamente para anidar en el sistema de suministro de detergente basado en tanque mecánico Bullseye de la empresa, que mezcla la solución de jabón con agua y asegura proporciones adecuadas de dilución de detergente para lavado de autos.
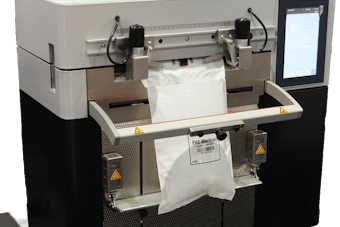
Las fugas son un enemigo importante de cualquier operación de embotellado de líquidos, pero el sentimiento es doblemente cierto para los productos químicos concentrados de Diamond Shine. Dado el contenido de potencia industrial de las botellas, las botellas de detergente de 2.5 gal requieren un sellado infrarrojo con papel de aluminio mientras se tapan. Y el empaque secundario en estuches impresos de dos piezas también es lo más robusto posible, ya que utiliza cartón corrugado de doble pared y una división de cartón corrugado estilo Z. Dos botellas por caja se empacan en una posición paralela para que encajen juntas en un sistema de empaque particionado y bien empacado. Los pesos de las cajas varían según el producto, pero cada uno pesa alrededor de 50 libras.
 Las operaciones de selección al comienzo de la línea se colocan en posición vertical y orientan las botellas sueltas de HDPE de 2,5 galones fuera de una tolva. La línea espejo después de una sola unidad de selección, pero solo una línea está en uso regular hasta que la producción alcance los volúmenes futuros esperados.
Las operaciones de selección al comienzo de la línea se colocan en posición vertical y orientan las botellas sueltas de HDPE de 2,5 galones fuera de una tolva. La línea espejo después de una sola unidad de selección, pero solo una línea está en uso regular hasta que la producción alcance los volúmenes futuros esperados.
Génesis de una línea personalizada
En un mercado laboral escaso, el crecimiento estimula la automatización. Desde la adquisición de Diamond Shine hace unos años por Sonny's, ha crecido rápidamente.
El impulso principal para el movimiento estuvo en el lado del procesamiento de las operaciones, en el aumento de la capacidad de mezcla a través de tanques de mezcla más grandes y la adición de tanques de almacenamiento a granel para los productos químicos a granel más utilizados. Este almacenamiento de productos químicos a granel evitaría la necesidad de agregar manualmente muchos de los productos químicos de gran volumen, a través de tambores y contenedores, al mezclar el producto. Pero como suele ser el caso cuando los procesos ascendentes mejoran y se vuelven más rápidos, las operaciones de empacado posteriores deben seguir el camino, para que no se conviertan en un cuello de botella.
Las operaciones de envasado de detergente de 2,5 galones, conocidas internamente como la línea Bullseye, ocuparon el primer lugar en la lista de deseos de la empresa en cuanto a automatización de envasado. Este formato había sido previamente un proceso de empaquetado manual que no era muy amigable con la mano de obra. Era pesado en el empaque secundario y creaba algunas situaciones complicadas al llenar el detergente concentrado.
Pero la falta de automatización heredada significaba que había pocos equipos o infraestructura de empaque existentes en la ubicación anterior que necesitarían ser reubicados o reemplazados. Cuando los líderes consideraron renovar sus nuevas instalaciones para satisfacer sus necesidades, incluida una pizarra casi en blanco de un proyecto de línea de envasado de detergentes de 2,5 galones, la empresa contactó al integrador de líneas de envasado y procesamiento Patrick Coakley de Plant Automation Group (PAG). Procesó los números en factores como los requisitos de velocidad de línea, la solidez del empaque, el deseo de redundancia y la preferencia de poder crecer en líneas de empaque si las velocidades o la demanda aumentaran. Coakley recomendó un enfoque en el que él y PAG integrarían la línea de empaque primario.
“Cuando comenzamos a investigar los requisitos a largo plazo para automatizar el empaque de esta jarra de dos galones y medio, nos dimos cuenta de que sería un proyecto interesante”, dice Coakley. “Todos los fabricantes que trajimos a la mesa fueron elegidos cuidadosamente para ser el equipo óptimo para este conjunto único de deseos y necesidades”.
Ahora, PAG también realiza muchos negocios integrando aplicaciones de empaquetado de final de línea y secundarias aguas abajo. Pero en este caso, las circunstancias les indicaron una solución más local. Coakley recurrió al socio frecuente del proyecto Hamrick Packaging Systems, un OEM de Ohio que no está muy lejos de Diamond Shine, para integrar la tienda de cajas y el empaque secundario hasta el paletizado al final de la línea. El apretón de manos entre los dos esfuerzos de integración paralelos ocurriría en la función de empaquetado de cajas. Aquí está su relato de cómo surgió la colaboración.
“Hamrick simplemente hace un trabajo fantástico”, dice Coakley. “Jordan está haciendo crecer su empresa y hace lo correcto para sus clientes. Para mí, parte de ello fue que Hamrick estaba físicamente cerca del fabricante, pero también tenía la capacidad de colocar contenedores de forma robótica. Y debido al peso de los contenedores, necesitábamos una solución de colocación robótica”.
Con un sistema de empaque robusto que maneja cajas de 50 libras como el nombre del juego, se pondría menos énfasis en las velocidades generales: seis cajas por minuto, por línea (la línea está reflejada), o 15 cajas por minuto para todo el sistema, iba a ser más que suficiente para el futuro previsible.
“Patrick nos preguntó: ‘¿Pueden empaquetar esto en cajas? ¿Puede erigir, sellar, paletizar e insertar la partición?’”, recuerda Jordan Hamrick. “Y sí, podríamos. Ya habíamos hecho la inserción de particiones robóticas antes, pero no para un estilo Z. Esa fue una nueva pieza de equipo que tuvimos que idear. La formadora de cajas la habíamos hecho antes, pero no para una caja de doble pared, así que agregamos algunos componentes para poder ejecutarla. Pero teníamos el plan listo para poder amueblar toda la línea en casa. Solo se necesitaron algunos ajustes menores e ingeniería para hacer el trabajo”.
Inicialmente, Hamrick había considerado utilizar las formadoras de cajas de otro proveedor, que con frecuencia venden e integran para sus propios clientes. Pero Hamrick se dio cuenta de que, a estas velocidades, sería mejor que también dieran este paso internamente.
“Procesaban a 25 cajas/min, y eso era un poco excesivo para lo que necesitábamos para procesar cinco o seis cajas por minuto por línea. Y teníamos nuestro propio modelo de formadora de cajas de 15 por minuto que rediseñamos hace un par de años”, dice Hamrick.
Las configuraciones robóticas y las operaciones de final de línea fueron las siguientes en discutirse, y otro cambio en los planes se produjo poco después de que Hamrick entrara en el juego. Los diseños iniciales requerían una sola línea de envasado secundario. Pero, al mismo tiempo, el equipo de ventas de Sonny se fijó un objetivo ambicioso a largo plazo para cambiar su combinación de formatos de paquetes de detergente entre tambores y paquetes de 2,5 galones. Este cambio no ocurrirá de la noche a la mañana, ni mucho menos. Pero si el equipo de ventas comienza a cumplir su meta de mezcla de ventas y cuando lo haga, una línea de empaque secundario de un solo carril se volvería obsoleta para el volumen previsto muy rápidamente.
Entonces, el nuevo plan de ataque se convirtió en un sistema espejo de dos líneas con mucho espacio para el crecimiento futuro esperado en este formato de paquete. El plan sería capaz de mantener instalaciones robóticas individuales en el empacador de cajas y el paletizador, aunque todavía se usarían dos robots de inserción de particiones en espejo en el taller de cajas de una tolva. La línea espejo después de una sola unidad de selección, pero solo una línea está en uso regularmente hasta que la producción aumente a los volúmenes futuros esperados.
“La forma en que Hamrick y nosotros diseñamos la línea fue proporcionar una única instalación robótica que admitiera dos líneas”, recuerda Coakley. “Así que, aunque no hay redundancia en términos de una relación uno a uno clara, estamos reduciendo el espacio. Y dado que Hamrick ha hecho un trabajo tan fantástico con los robots Fanuc durante los últimos tres años, y yo tenía tanta confianza, recomendamos que Jordan también lo maneje para hacer un paletizador robótico para sus necesidades”.
Una vez ordenados los roles y las responsabilidades, los planes finalizados para la línea se concretaron rápidamente. Packaging World habló con el ingeniero de automatización de Sonny, Adam Harper, la contraparte del lado de la marca de PAG y Hamrick en la instalación, a fines de 2022. Como era de esperar, hubo algunos contratiempos en el camino, porque "no todo en CAD 2D o 3D siempre se alinea". perfectamente”, bromea Harper, pero las tres partes trabajaron en lo que ahora es una línea de empaque completa bastante ingeniosa.
Empacado primario
Integradas por PAG, las operaciones de empaque primario comienzan con botellas vacías de HDPE estilo F de 2.5 gal que ingresan a las instalaciones de Mentor en palets de aproximadamente 60 botellas por fila, a ocho filas de alto, con láminas deslizantes que separan cada fila. Los operadores despaletizan manualmente cortando el encogimiento de la tarima y colocando cada fila de botellas en una cinta elevadora inclinada que alimenta un conjunto de posicionador único de Pace, una marca de ProMach, que comienza con una tolva anular que gira paralela al piso en un entrepiso. La tolva orienta las botellas sobre sus costados y las coloca en una serie de correas dentadas, pero la dirección en la que miran mientras viajan (hacia abajo o hacia el cierre) sigue siendo aleatoria hasta que las botellas pasan a través de un conjunto de gancho giratorio mecánico que las orienta en la postura deseada de dirección inferior. Después de la orientación, un labio mecánico en las correas atrapa la superficie plana de los fondos delanteros de las botellas a medida que pasan, levantándolas por los lados.
“El siguiente paso es que todas las boquillas deben estar orientadas en la misma dirección, con la boquilla al frente”, dice Harper. “Entonces, al final del ensamblaje del posicionador de botellas hay un orientador de botellas. Tiene dos fotocélulas láser Allen-Bradley, una para ver el espacio dentro del mango y la otra para ver la boquilla. Si la botella está orientada en la dirección correcta, con la boquilla hacia adelante, los sensores leen el asa y la orientación como verdaderas y la botella no está girada. Si la botella está orientada incorrectamente, con la boquilla hacia atrás, un ojo fotoeléctrico lee el mango como verdadero, pero el otro lee la boquilla como falso. Cuando ese es el caso, se mueve ligeramente hacia arriba en la línea para que un brazo giratorio lo gire 180 grados, y todas las botellas salen del seleccionador Pace en la orientación correcta”.
¿Te estás preguntando, “Espera, ¿solo un seleccionador? ¿Pensé que esto era una operación de doble línea en espejo? Si es así, buena observación; aquí es donde la línea se divide en dos. Una vez orientadas, un transportador de desvío de Wrabacon Inc., una empresa de PAG, bifurca el transportador único en forma de "Y" con dos líneas aguas abajo. Una compuerta en la división desvía las botellas aguas abajo hacia cualquier línea que necesite alimentación.
 El llenado se realiza en equipos de seis cabezales donde las lanzas descienden sobre husillos de bolas en las botellas vacías. Se puede usar el llenado superior, el llenado inferior o un híbrido de los dos métodos llamado seguimiento para llenar las botellas según las características del producto. Cada botella se asienta en una celda de carga individual y el llenado se mide por peso en lugar de volumen o línea de llenado.
El llenado se realiza en equipos de seis cabezales donde las lanzas descienden sobre husillos de bolas en las botellas vacías. Se puede usar el llenado superior, el llenado inferior o un híbrido de los dos métodos llamado seguimiento para llenar las botellas según las características del producto. Cada botella se asienta en una celda de carga individual y el llenado se mide por peso en lugar de volumen o línea de llenado.
Las dos líneas viajan en paralelo a dos llenadoras de seis cabezales espejos del Grupo PASE de Massman, donde las lanzas descienden sobre tornillos de bola en las botellas vacías. Cada uno de los dos llenadores maneja seis botellas a la vez. Cada botella se asienta en una celda de carga individual y el llenado se mide por peso en lugar de volumen o línea de llenado.
 Las botellas llenas se transportan a un tornillo de sincronización de diseño personalizado con compuerta frontal, donde se aceleran y dosifican una por una hasta que alcanzan un bolsillo estacionario en el tornillo y una taponadora de tornillo estilo mandril empuja una tapa sobre la botella. El par de tapado debe ser preciso para acomodar un sello de lámina de tapa interna que se sellará con infrarrojos a la botella aguas abajo.
Las botellas llenas se transportan a un tornillo de sincronización de diseño personalizado con compuerta frontal, donde se aceleran y dosifican una por una hasta que alcanzan un bolsillo estacionario en el tornillo y una taponadora de tornillo estilo mandril empuja una tapa sobre la botella. El par de tapado debe ser preciso para acomodar un sello de lámina de tapa interna que se sellará con infrarrojos a la botella aguas abajo.
“En un mundo ideal, estaremos haciendo 12 botellas por minuto en cada lado, o alrededor de 30 segundos por ciclo”, dice Harper. “Pero hacemos jabones que son extremadamente concentrados, por lo que puede ser muy espumoso. Un objetivo más realista para los productos químicos más espumosos es llenar unas 10 botellas por minuto, en el transcurso de toda la producción. Pero estamos apuntando a 12”.
Las llenadoras de seis cabezales pueden llenarse por la parte superior, por la parte inferior o por seguimiento, según la viscosidad y las características de la espuma del detergente que se está llenando. El llenado superior es el más rápido y, como su nombre lo indica, se llena desde la parte superior de la botella, donde permanecen las lanzas durante todo el llenado. El relleno superior es adecuado para ceras y productos que carecen de tensioactivos, por lo que puede soportar cierta agitación sin formar espuma. Pero los productos químicos que contienen tensioactivos no se pueden llenar fácilmente por la parte superior debido a sus características de formación de espuma, por lo que ahí es donde entra en juego el llenado por el fondo. Las lanzas se sumergen en el fondo de la botella vacía y permanecen allí para el llenado. Este es el método más lento, considerando que hasta 25 libras de detergente líquido se acumularán sobre la lanza a medida que se llena, trabajando contra el flujo. Pero también es más suave con los productos más espumosos y propensos a la espuma. Para recuperar algo de tiempo en un llenado inferior, se puede usar la opción de seguimiento de llenado. Al usar este método, las lanzas se elevan un poco más de una pulgada por cada cinco libras de detergente líquido que se llena. Esta es una especie de enfoque de lo mejor de ambos mundos que es suave con el producto y aún más rápido que el llenado inferior, pero requiere la intervención del operador. En última instancia, elegir entre los tres es una función del producto, el operador y las velocidades de llenado deseadas o requeridas. La flexibilidad para cambiar métodos para diferentes productos y requisitos es un factor importante para Sonny's.
Luego, las botellas llenas se transportan a un tornillo de sincronización de diseño personalizado con compuerta frontal, donde se aceleran y dosifican una por una hasta que alcanzan una cavidad estacionaria en el tornillo. A pesar de que el transportador continúa corriendo debajo de la botella temporalmente estacionaria, se mantiene en su lugar debajo de una tapadora de rosca Balpack estilo mandril, comprada a All-Fill, hasta que un brazo neumático empuja con éxito una tapa sobre la botella. Las tapas en sí se introducen en la tapadora de rosca a través de una tolva y un elevador inclinado, luego se dispensan por un conducto hacia un bolsillo para tapas, donde cada tapa se encontrará con precisión con la botella llena, pero sin tapar, que espera. El cilindro de aire neumático empuja hacia abajo la tapa colocada y la gira sobre la rosca del cuello de la botella. Antes de que la botella tapada haya salido siquiera del primer bolsillo de tapado, la siguiente botella destapada ha pasado la compuerta de tope en la cabeza del tornillo de sincronización y ya se está desplazando a través del tornillo para ser tapada.
“Una vez que pasa por la primera estación en la que se colocó la tapa, el tornillo de sincronización la lleva un poco más lejos para llevar la botella a una segunda estación de torsión para realizar una verificación de torsión secundaria en la parte superior de la tapa solo para asegurarse de que esté en su posición correcta la configuración de torque correcta”, dice Harper. “Es importante que tenga el par correcto, ya que hay una tapa de aluminio en el interior de la tapa que debe ajustarse lo suficiente para que, cuando pase por un sellador infrarrojo más adelante en la línea, el aluminio se coloque correctamente para alinear y sellar a la parte superior de la botella, en lugar de a la tapa. Si está demasiado apretado, arrugará la lámina, lo que provocará un mal sellado por infrarrojos. Y si está demasiado flojo, no se sellará en absoluto en la botella”. Más sobre ese sello infrarrojo más tarde.
Después de salir de la segunda estación de torsión, cada botella viaja a través de dos sensores Keyence separados. Primero, un sensor de detección de papel de aluminio confirma que hay un papel de aluminio en la tapa y rechaza los que no lo están en una bandeja de rechazo. El siguiente es un sensor de altura de la tapa; Harper explica su propósito.
“Los pesos son sustancialmente diferentes entre nuestros productos químicos, distienden ligeramente las botellas de diferentes maneras, y cada uno cambia ligeramente la altura de la tapa, incluso en la botella del mismo tamaño”, explica Harper. “El rango de altura correcto se ajusta durante cada carrera por parte del operador. Usando las primeras seis botellas que salen de la llenadora de seis cabezas en una producción como muestra representativa de lo que sigue, el operador establece el límite de altura de torque para las botellas restantes. Luego, cualquiera que esté fuera de especificación, más o menos uno o un milímetro y medio, también se rechaza”.
Después de las operaciones de tapado y el control de calidad relacionado, la aplicación de etiquetas sensibles a la presión se realiza en una etiquetadora NITA, una máquina que, según Harper, es fácil de usar y requiere muy poca capacitación. Si bien este equipo ciertamente es capaz de realizar trabajos más complejos y muchas recetas, la variación de etiquetado en la línea de productos químicos líquidos de 2,5 g es bastante limitada. Los ajustes en el posicionamiento de las etiquetas durante los cambios son poco frecuentes y, por lo general, se basan en una pequeña distensión o deformación de la botella que puede ocurrir con detergentes líquidos más pesados o con el producto ocasional llenado en caliente.
 Las operaciones de etiquetado son bastante uniformes de un producto a otro.
Las operaciones de etiquetado son bastante uniformes de un producto a otro.
Después del etiquetado, encontramos la única pieza importante del equipo heredado que vino de la línea de envasado anterior, en su mayoría manual, en Wickliffe. Es una selladora infrarroja de Enercon, que no toca físicamente las botellas en absoluto. ¿Recuerda lo importante que era el torque correcto en las operaciones de tapado? A medida que las botellas tapadas pasan por debajo de este equipo, el dispositivo Enercon calienta lo suficiente la tapa de aluminio colocada con precisión que descansa sobre el borde de la botella, debajo de la tapa, de modo que el aluminio y la botella se adhieran entre sí. Este es un paso importante, ya que cuando un asistente de lavado de autos finalmente abre la tapa para mezclar el detergente en un dispositivo Bullseye, encontrará un sello de aluminio debajo de la tapa. La estación de dilución Bullseye luego rompe ese sello para liberar el detergente dentro del equipo, lo que significa que el encargado del lavado de autos no tiene que manejar los químicos líquidos concentrados.
 A medida que las botellas tapadas pasan por debajo de este equipo, un sistema de sellado por infrarrojos calienta lo suficiente la tapa de aluminio colocada con precisión que descansa sobre el borde de la botella, debajo de la tapa, de modo que la lámina y la botella se adhieran entre sí.
A medida que las botellas tapadas pasan por debajo de este equipo, un sistema de sellado por infrarrojos calienta lo suficiente la tapa de aluminio colocada con precisión que descansa sobre el borde de la botella, debajo de la tapa, de modo que la lámina y la botella se adhieran entre sí.
Se produce algo de acumulación después del sellado con papel de aluminio y las botellas se orientan nuevamente, esta vez para prepararlas para el empaque robótico en cajas. Usando un conjunto de gancho de giro mecánico simple pero elegante, las botellas se giran para viajar aguas abajo primero, con las boquillas hacia afuera. Los transportadores inclinados de productos de Lagrotta Packaging suministran las correas dentadas y el transporte para esta parte de la línea.
“Hay una variedad de métodos que puede usar para voltear estas botellas”, dice Hamrick. “Hay una rueda de estrella, hay tornillos de sincronización y otras opciones, pero la forma más rentable para esa botella específica en líneas de baja velocidad es usar el conjunto de gancho giratorio”.
Envases secundarios y de final de línea
En este punto, la línea pasa del empaque primario al secundario, y ahí es donde PAG entregó las claves de integración de la línea a Hamrick. Al comienzo de las operaciones de empaque de cajas, dos formadoras de cajas Hamrick mecánicas para zurdos con sistema neumático Festo funcionan en tándem, una de ellas hábilmente orientada en un ángulo de 45 grados con respecto a la otra para acomodar un pilar estructural en la instalación. Pero ¿por qué usar dos tiendas de caja separadas e independientes para estas velocidades más lentas y un formato de paquete único?
 Las operaciones de las cajas incluyen formado de cajas fuertes corrugadas impresas de doble pared, encintado automático, e inserción robótica de particiones.
Las operaciones de las cajas incluyen formado de cajas fuertes corrugadas impresas de doble pared, encintado automático, e inserción robótica de particiones.
“Inicialmente, a estas velocidades, buscamos ejecutar una formadora de cajas, una insertadora de particiones y luego desviar las cajas para emparejarlas con una línea u otra, cualquiera que tuviera más cajas. Después de todo, el formato del paquete está dedicado en ambas líneas, todas son botellas de 2,5 galones”, recuerda Hamrick. “Pero la fórmula de los jabones y las ilustraciones de los estuches pueden variar entre las dos líneas. Un relleno podría ser un tipo de detergente, el otro un tipo diferente. Y si solo tuviéramos una tienda de cajas, necesitaríamos hacer palés o revistas mixtas de cajas. Al final, fue más fácil hacer una tienda de cajas dedicada en cada línea. Y luego, pudimos usar el robot para poder empacar sincrónicamente entre ambos, incluso cuando están ejecutando un producto diferente en cada línea”.
Los talleres de caja están diseñados para manejar corrugado de doble pared 48 ECR extremadamente pesado para acomodar cargas líquidas de 50 lb. Cada formadora de cajas cuenta con un cargador de 6 pies (aproximadamente 100 ct de espacios en blanco corrugados), un mecanismo de cuadratura y un sistema de indexación servo, con controles en la parte posterior. Un cabezal de cinta de DEKKA, una empresa de ProMach, en cada una de estas formadoras de cajas pega con cinta la parte inferior de las cajas montadas; un servobrazo simplemente hace avanzar la caja erigida a lo largo de un accesorio de cierre de solapa inferior y pasa por un cabezal de cinta.
 Un brazo robótico con pinza de succión (A) toma una lámina de partición 2D de una bandeja, y (B) dobla la partición en 'Z' 3D a lo largo de un mandril plano antes de insertar la partición en la caja formada esperando abajo.
Un brazo robótico con pinza de succión (A) toma una lámina de partición 2D de una bandeja, y (B) dobla la partición en 'Z' 3D a lo largo de un mandril plano antes de insertar la partición en la caja formada esperando abajo.
Inmediatamente después, y de hecho acoplado a cada formador de cajas, se encuentra un insertador de particiones robótico. Hamrick seleccionó dos LR Mate 200iD/7L de 6 ejes de Fanuc para esta operación.
“No necesita una gran carga útil aquí, ya que es solo la inserción de la partición; solo necesitas velocidad y alcance”, dice Hamrick. “La partición podría ser solo una fracción de kilogramo. Las pequeñas placas de vacío toman particiones planas 2D premarcadas de una pila, luego las pasan a través de un mandril curvo para crear el formato Z y luego las sumergen en la caja”.
Las cajas erguidas con cinta en la parte inferior avanzan en un transportador de rodillos accionado por TGW Case Conveyors debajo de las dos líneas de alimentación de botellas y giran 90 grados para alinearse y correr paralelas entre sí, como dos alimentaciones emparejadas de producto/caja. Un robot M-710iC/50H de cinco ejes de Fanuc reside entre las dos líneas paralelas. No es necesario un sexto eje allí, ya que todo el trabajo que se realiza está en el mismo plano: las botellas no requieren rotación ni manipulación adicional. El herramental de extremo de brazo diseñado por Hamrick es un híbrido de abrazaderas mecánicas y de vacío que agarra las botellas por el asa, seleccionando dos botellas a la vez. A medida que el robot recoge y transporta las botellas desde la entrada del producto, un collar mecánico desciende sobre las solapas abiertas de la siguiente caja que se va a empacar, lo que garantiza una colocación adecuada en las cajas divididas y evita que las botellas se enganchen en las solapas de las cajas de cartón corrugado.
Los seis cabezales de llenado aguas arriba en cada línea indican que la mayoría de las operaciones aguas abajo se realizan en grupos de seis, como lo demuestra el paso de calibración del sensor de altura de la tapa mencionado anteriormente. El empaque de cajas también se realiza en grupos de seis, pero con un buffer adicional de dos botellas. El brazo robótico único empacará una línea hasta la línea opuesta según acumula ocho (seis más un búfer de dos) botellas. Luego cambiará de una línea a la otra, para hacer tres selecciones de dos, dos y dos, dejando las últimas dos botellas en su lugar mientras la línea se repone a ocho. Luego, el robot cambiará a la otra línea, momento en el cual se habrán acumulado ocho botellas, y este proceso se repetirá durante toda la corrida.
 Aquí comienzan las operaciones de empacado secundario. Las líneas de cajas formadas con particiones que salen del almacén de cajas (izquierda) se unen con las líneas de botellas llenadas, etiquetadas, y tapadas, para el empacado robótico en cajas.
Aquí comienzan las operaciones de empacado secundario. Las líneas de cajas formadas con particiones que salen del almacén de cajas (izquierda) se unen con las líneas de botellas llenadas, etiquetadas, y tapadas, para el empacado robótico en cajas.
“Funciona bien porque hay ocho botellas y el robot recoge seis de ellas”, dice Harper. “Eso es dos botellas por caja y tres cajas por línea que se empujan hacia abajo en cada ciclo, que es exactamente lo que agarra el paletizador en cada selección. Hay comodidad y eficiencia integradas en ese diseño”.
Las solapas superiores de las cajas empacadas se cierran mecánicamente y se pegan con cinta en otro cabezal de cinta DEKKA a medida que se transportan hacia la paletización. El etiquetado automático de cajas ahora también ocurre en el apretón de manos entre el empaque de cajas y el paletizado. Sonny's había estado preetiquetando los espacios en blanco corrugados en los primeros días de la producción de esta línea de empaque, pero desde entonces la compañía ha invertido en dos etiquetadoras NITA más diseñadas para cajas corrugadas que se integraron en la línea inmediatamente después del empaque de cajas, justo antes del paletizado para permitir que el etiquetado ocurra bajo demanda.
Las operaciones de final de línea se realizan mediante otro brazo robótico único de Fanuc que sirve a ambas líneas, esta vez un robot M-410/185 kilogramos, lo que equivale a una carga útil potencial de aproximadamente 370 libras. En esta operación, el brazo recoge tres cajas a la vez, por lo que a aproximadamente 50 libras por caja, eso hace que las selecciones sean de 150 libras. Dado que cada recolección es de seis botellas en total o tres cajas, el ritmo es notablemente más lento al final de la línea, superando fácilmente las operaciones primarias.
Hamrick dejó las preferencias de patrones de palés en manos de Harper, quien, naturalmente, consultó a los empleados que habían estado paletizando manualmente las operaciones en la planta de Wickliffe. Esos empleados seleccionaron un patrón de 3x4, o 12 ct por capa, en tres filas de altura, que sigue siendo el patrón de palet preferido en la actualidad. Las láminas deslizantes se colocan encima del palet vacío a través de un pórtico después de dispensar el palet; no se requiere ninguna entre capas. Las tres filas se apilan sin girar la fila central, evitando así que sobresalgan. Aunque el peso pesado va en contra de la altura de las tarimas, hace que las tarimas unificadas de 36 quilates sean resistentes y robustas que viajan bien, según Harper. En cuanto a velocidades, cada línea produce un palet cada seis minutos a velocidad de crucero, con margen para acelerar a partir de ahí si fuera necesario. Incluso al final de la línea, la operación de empaque sigue una regla de seis. Si recuerda, el llenado opera de 10 a 12 botellas por minuto por línea. Eso equivale a un palé de botellas de 72 ct, o un palé de cajas de 36 ct, cada seis minutos.
 Un brazo robótico de cinco ejes toma dos botellas llenas a la vez y las ubica en las cajas corrugadas con particiones. Las cajas se cierran, encintan, y reciben la etiqueta antes de llegar al paletizador.
Un brazo robótico de cinco ejes toma dos botellas llenas a la vez y las ubica en las cajas corrugadas con particiones. Las cajas se cierran, encintan, y reciben la etiqueta antes de llegar al paletizador.
Un desarrollo más reciente ha sido entrenar al robot para rotar las selecciones de tal manera que garantice que las etiquetas estén orientadas hacia afuera en ambos lados de la tarima, ya que el patrón de tarima más natural daría como resultado que todas las etiquetas solo sean visibles en una de las tarimas cuatro lados.
“Simplemente facilita el envío y es más fácil para nuestros distribuidores”, dice Harper sobre la actualización.
El efector final de este paletizador fue suministrado por Joulin, una empresa de Piab, y quizás sorprendentemente, es capaz de realizar selecciones de más de 150 lb utilizando solo succión al vacío y sin abrazaderas mecánicas.
“El plan original detrás de esto era usar una herramienta similar a la que habíamos usado para una empresa de agua embotellada, que era más como un tenedor y una abrazadera”, dice Jeff Eckstein, director de ingeniería de Hamrick. “Pero trajimos a Joulin, con quien hemos trabajado en otras aplicaciones. Estaban muy seguros de que podíamos recogerlos con una simple aspiradora, lo que simplifica todo, ya que el robot puede flotar y hacer estas filas muy fácilmente sin interferir con nada más y sin necesidad de abrir abrazaderas ni nada por el estilo.
Las operaciones de fin de línea se realizan mediante otro brazo robótico único, pero este con una carga útil potencial de aproximadamente 370 libras. En esta operación, el brazo recoge tres cajas a la vez, por lo que a aproximadamente 50 libras por caja, eso hace que las selecciones sean de 150 libras. Tal vez sorprendentemente, las herramientas de extremo de brazo pueden lograr fácilmente selecciones de más de 150 lb utilizando solo succión de vacío y sin clamps mecánicas.
Prime Conveyor suministró transportadores de palets para el proyecto, proporcionando un dispensador de palets, un insertador de hojas estilo pórtico y un transportador/acumulación de palets. La envoltura elástica no se realiza en línea; los palés se enrollan manualmente desde la línea de envasado hasta una enfardadora. Los planes para 2023 incluyen una enfardadora en línea.
Superando la interrupción de la cadena de suministro
Ningún proyecto está libre de obstáculos, y vale la pena mencionar los que se enfrentaron en el proyecto de automatización de detergentes de Sonny. Como ocurrió con la mayoría de los proyectos de automatización realizados durante la pandemia, los problemas de la cadena de suministro fueron un obstáculo para los plazos. Una solución que terminó siendo un hallazgo sorprendente tanto para Hamrick como para Sonny fue el pivote de las HMI de Weintek y las unidades, unidades y servos de Mitsubishi Electric. Sin embargo, los PLC estándar de Allen-Bradley se integraron en todos los centros de máquinas.
“No había estado tan familiarizado con ellos, pero han sido geniales. Son muy fáciles de usar y tan buenos como cualquier otra cosa que hayamos visto”, dice Harper sobre las interfaces y las unidades.
Por su parte, Hamrick tenía la intención de que este proyecto fuera la primera prueba de aceptación de fábrica (FAT) y construcción de línea completa en sus propias instalaciones completamente nuevas de 6.038 metros cuadrados. Pero eso no fue posible porque los problemas de construcción y cadena de suministro retrasaron la construcción de las instalaciones. Si bien los centros de máquinas individuales se probaron en las instalaciones existentes de Hamrick, no había espacio para FAT en toda la línea a la vez, por lo que FAT también terminó siendo una prueba de aceptación en el sitio. Muchos de los problemas que Hamrick habría solucionado en su nueva instalación tendrían que ocurrir en el sitio del cliente. Pero este tipo de experiencias fueron comunes, posiblemente incluso típicas en 2022.
“Esa es la realidad con la que todos lidiamos, y siempre habrá dolores de puesta en marcha. Acabamos de ver más de ellos desde que comenzamos aquí”, dice Harper. “Sin mencionar que también estábamos comenzando nuestra propia nueva planta de fabricación. Como dije, los planes CAD no son perfectos en el mundo real. Así son las cosas en el mundo del packaging.
“Pero no cambiaría nada”, concluye Harper. “Patrick y Jordan, y realmente todos los fabricantes y proveedores con los que tratamos han sido excelentes, no tengo ninguna preocupación sobre nadie con quien hayamos ido. Y cada vez que traemos a nuestros clientes, o empresas hermanas a esta planta, nadie puede apartar la vista de los robots. Son básicamente una obra maestra”.