El diseño moderno de empaques debe considerar el uso creciente de la robótica y cómo ese proceso automatizado interactúa con el empaque; desde la fabricación hasta el cumplimiento, la entrega e incluso el final de su vida útil.
Brent Lindberg, "director de Curiosidad" de la firma de diseño de envases estructurales Fuseneo, habló con los participantes de ISTA sobre los robots y dijo: "No hay un solo fabricante con el que hayamos hablado que no haya tenido problemas para cubrir la escasez de mano de obra. Entonces, hablamos de robots no como un reemplazo de la mano de obra, sino como una alternativa a la mano de obra, en muchos casos, cuando no se puede encontrarla, o cuando es un trabajo que va a ser agotador o repetitivo.
Lindberg afirmó que la robótica se usa comúnmente en el entorno de fabricación para movimientos repetitivos, o para juntar cosas, cargar o llenar una caja. El cumplimiento es otra gran área de crecimiento en la automatización robótica.
“Entonces”, dice Lindberg, “te adentras en algunas de las cosas realmente interesantes en las que tienes robots que están armando palets, no el típico pick-and-place, sino moviéndose y construyendo palets mixtos. Y ahí es donde las cosas se ponen mucho más interesantes. O tienes robots que están trepando, atormentando y recogiendo cosas". Lindberg agregó que los robots ya no son para el futuro, su compañía los está necesitando ahora.
Sobre el cumplimiento o la satisfacción, Lindberg dijo: “Lo que es importante ver aquí es realmente la diversidad de oportunidades. Tenemos algo que se está colocando por succión en un palet, tenemos algo que se agarra con los dedos de los estantes. Tenemos el campo Kiva, que en realidad se trata más de restricciones de tamaño y peso y estos cubos que pueden contener ciertas cosas o no hacerlo. Y luego tienes artículos que se van a dejar en bolsas. Entonces, si se piensa en todos los diferentes puntos de contacto y en las formas en que las cosas se mueven en este sistema robótico de cumplimiento, comenzaremos a tener una idea de la diversidad de robots que estamos viendo en este campo. Y lo más importante es realmente la diversidad y la forma en que manejamos los productos… esto está cambiando drásticamente".
La entrega a través de drones es otra área con gran diversidad, Lindberg cuestionó: “¿Está entregando frascos pequeños de medicamentos? ¿Ests entregando un par de botas pesadas? Citó un ejemplo de un sistema de entrega con una caída desde nueve pies. “El robot tuvo que permanecer a nueve pies sobre el suelo y dejar caer el paquete. Entonces, ¿qué significa todo esto para nuestros productos si no solo estamos superando una caída de tres pies, sino que estamos superando una caída de nueve pies sobre una superficie desconocida? Un objetivo que podría colocarse en una acera de concreto, o podría colocarse en un patio con césped, o en la terraza".
“Cuando hablamos de estos diferentes sistemas robóticos”, continuó, “están diseñados para ser eficientes para ciertos tamaños, pesos y rangos, por lo que el diseño del empaque se puede cargar en un cubo, en algunos casos, [diseñar] envases específicos para ese robot y solo para ese robot. Y así, esta milla extra, este último toque de entrega, se está volviendo realmente diverso en términos de cómo se toca, cómo se maneja: las limitaciones de tamaño, las limitaciones de peso y las limitaciones de durabilidad que podrían imponerse a nuestro embalaje".
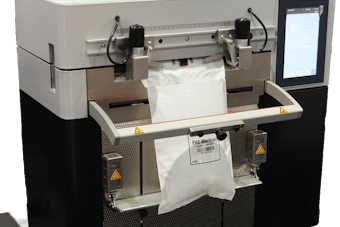
 Fuseneo/ISTA
Fuseneo/ISTA
Forma
Lindberg afirmó cómo a menudo no pensamos en la forma de las cosas, lo cual es importante ya que los robots tienen dificultades con los objetos que no se mueven de manera predecible. Usando una lata de sopa en un centro de reciclaje como ejemplo, dijo: “No pensamos en esta lata de sopa: cuando baja por una cinta transportadora, la cinta transportadora se detiene, la lata de sopa sigue rodando. Hicimos pruebas de visión y de agarre, y el transportador se detiene y la lata se balancea hacia adelante y hacia atrás, o se cae completamente. Si se balancea hacia adelante y hacia atrás, el robot está tratando de levantarlo, tratando de averiguar dónde va a caer ... ¿cómo agarra esa forma? ¿Es una ventosa que se puede agarrar desde la parte superior? ¿Es un juego de pinzas? Hay muchas cosas que se incluyen en algo tan simple como una lata de sopa o un balón de fútbol cuando se trata de este medio de transporte y recoger algo".
Material
Existen muchos componentes diferentes que intervienen en cómo un robot ve y recoge algo, y la lógica de cómo va a recoger el objeto. Las selecciones de materiales que determinan si el paquete final es rígido, blando, se deforma o queda plano, afectan la capacidad del robot para recoger el objeto.
Los materiales flexibles, en particular, pueden tener problemas de visibilidad, si el paquete está doblado, cubriendo potencialmente los códigos de escaneo que el robot puede estar buscando, o terminando con un tamaño más pequeño de lo anticipado debido al cumplimiento manual. Lindberg agrega: “Cuando pensamos en los trabajadores de cumplimiento en Amazon FC o en cualquier otro centro de cumplimiento, se da discreción y, a veces, existe más o menos. Y cuánto el pliegue de la solapa en un simple sobre de polietileno puede tener un gran impacto en la forma en que se transporta y manipula. Y entonces vuelve al proceso, vuelve al diseño. Podemos diseñar esa bolsa para que siempre llegue a la misma línea en todo momento".
Peso
“Los robots están diseñados para soportar una cierta cantidad de peso, y si no vivimos dentro de esas limitaciones en un centro de cumplimiento determinado, entonces estamos forzando un manejo especial. Y cuando estamos forzando un manejo especial, generalmente estamos incurriendo en cargos adicionales y forzando procedimientos y procesos especiales, lo que puede retrasar las cosas y causar problemas posteriores”, dijo Lindberg, “por lo que es más problemático de lo que se piensa. Y cómo algo se resbala, se desliza o se maneja, es mucho más impactante de lo que la mayoría de la gente anticiparía".
 Fuseneo/ISTA
Fuseneo/ISTA
“¿Estamos diseñando algo para una caída de nueve pies o estamos diseñando algo para una caída de tres pies? ¿Estamos diseñando para resistir ciertos elementos porque la automatización lo entregará y lo dejará afuera, o un conductor puede empujarlo debajo del porche? Hay todas esas cosas diferentes en las que debemos pensar. ¿Necesita ser más resistente al agua, menos resistente al agua? "
Cierre
Lindberg dijo: “De las cosas que hemos analizado, los cierres se convierten en una de las dos cosas principales que siempre surgen. Y a veces es tan simple como un trozo de cinta u otro punto de pegamento, o simplemente la forma en que algo se une". Citó un ejemplo de una caja con solapas al final, y sin cierres, para sellar las solapas, que se abren cuando se levantan, expulsando el contenido.
SIOC (Envío en su propio contenedor)
"Ships in Own Container (SIOC) va a ser una tendencia creciente, creo que cada vez más marcas van a adoptar, y más y más minoristas van a empezar a exigir de las marcas, porque se convierte en el manejo esperado". Y Lindberg agregó que quitar ventanas, crear superficies más planas y etiquetadas son parte del proceso de diseño para ayudar con el manejo robótico y la automatización.
Gráficos
Lindberg dijo: “Hemos pasado mucho tiempo en este espacio con diferentes sistemas de prueba y diseñando para facilitar o verificar si algo funciona o es visible. A veces, en un entorno, buscamos crear una distinción de color o una distinción de contraste, porque queremos que el robot vea todos estos paquetes como este y todos estos paquetes así".
La "escalabilidad" es importante: observar los patrones y el reconocimiento de bordes para que el robot pueda saber qué elemento está en la parte superior. “Cuando bajo para agarrar algo, ¿estoy agarrando el que está más arriba, estoy agarrando suficiente de uno, estoy agarrando dos juntos? Pueden ser muy difíciles de detectar, por lo que utilizar patrones y funciones de impresión para crear una distinción cuando se tienen juntos objetos similares en los transportadores”, agregó.
Programable
Cuando tiene sistemas de visión que siempre están buscando algo, pero tiene obras de arte cambiantes, ya sean campañas publicitarias o campañas de temporada, ¿estamos creando complejidad? ¿Estamos creando marcas consistentes para que las busquen sin importar lo que esté sucediendo? ¿Estamos creando un contraste en esas marcas?
Reciclaje y clasificación
Lindberg preguntó: “¿Lo estamos haciendo más difícil o lo estamos haciendo más fácil? ¿Estamos cubriendo una botella con una etiqueta retráctil completa para que el sistema de visión ni siquiera pueda saber qué hay allí, dónde el gráfico lo cubre por completo y la etiqueta lo cubre por completo? Y así, el material no se puede detectar, el objeto debajo de la etiqueta no se puede detectar. Estamos haciendo mucho para hacer las cosas más difíciles en esta corriente de reciclaje.