Por Kevin Tardif
Este contenido fue enviado directamente a este sitio web por el proveedor.
Durante medio siglo, la imagen del gran robot articulado de seis ejes soldando cuerpos de automóviles y camiones se ha fijado en la imaginación popular. Los robots se utilizan en sectores tan diversos como el cuidado de la salud, alimentos y bebidas, fabricación de acero y almacenamiento, siempre que existan tareas repetitivas o desafiantes desde el punto de vista ambiental o ergonómico que se puedan realizar de manera más rápida, más confiable y / o más rentable. Hoy, los robots incluso están ensamblando nuevos robots.
Los robots vienen con uno a siete ejes, cada eje proporciona un grado de libertad. Un pórtico cartesiano de dos ejes generalmente se traza en los ejes X-Y o Y-Z. Un robot de tres ejes tiene tres grados de libertad y realiza sus funciones a través de los ejes X-Y-Z. Estos pequeños robots tienen una forma rígida y no pueden inclinarse ni rotarse por sí mismos, aunque pueden tener herramientas adjuntas que pueden girar o rotar o adaptarse a la forma de una pequeña carga útil. Los robots de cuatro y cinco ejes tienen flexibilidad adicional para rotar e inclinar. Un robot articulado de seis ejes tiene seis grados de libertad: la flexibilidad para mover objetos en cualquier dirección o rotarlos en cualquier orientación. Estos robots de seis ejes generalmente se eligen cuando una aplicación requiere una manipulación compleja de un objeto grande o pesado. Los robots de siete ejes son capaces de orientaciones adicionales para maniobrar herramientas en espacios reducidos. Pueden operar más cerca de la pieza de trabajo que otros robots articulados para un ahorro potencial de espacio.
Robots articulados
La popularidad de los robots articulados de seis y siete ejes refleja la gran flexibilidad que permiten los seis grados de libertad. Son fáciles de programar, vienen con su propio controlador y las secuencias de movimiento y la activación de E / S se pueden programar a través de una consola de aprendizaje fácil de usar. Pueden tener un alcance sustancial, más de tres metros con ciertos modelos. Esta gama de tamaños hace que los robots articulados sean adecuados para una gran cantidad de industrias y aplicaciones que implican la fabricación o el movimiento de materiales o productos terminados.
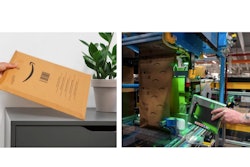
 Ejemplo de un robot articulado
Ejemplo de un robot articulado
Robots cartesianos
Un robot cartesiano, o lineal, es típicamente un robot de menor costo que consiste en un conjunto de actuadores lineales y / o actuadores rotativos en el extremo del brazo para aplicaciones 3D. Estos robots son muy adaptables y fáciles de instalar y mantener. Los trazos y tamaños de cada eje se pueden personalizar para la aplicación. Su alcance y carga útil son independientes entre sí, no entrelazados. El eje lineal viene en varios diseños que lo adaptan aún más a la función que realiza.
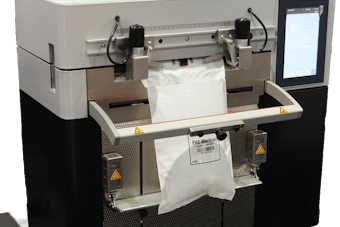
 Ejemplo de robot cartesiano.
Ejemplo de robot cartesiano.
Robots SCARA
 Ejemplo de robot SCARA.
Ejemplo de robot SCARA.
Robots delta
El robot delta es famoso por su velocidad, con capacidades de selección de hasta 300 / min. Su tipo de montaje lo coloca por encima de la zona de trabajo, lo que limita la pérdida de huella. A menudo se combina con un sistema de visión para recoger piezas colocadas al azar en aplicaciones complejas de clasificación y empaque. Al igual que los robots articulados y SCARA, generalmente contará con una consola de aprendizaje para una fácil programación. Los robots Delta a menudo se usan en aplicaciones de producción de alimentos, pero, al igual que los robots cartesianos, pueden requerir blindaje adicional o separación del ambiente.
Robots colaborativos
Los robots colaborativos, o cobots, son un desarrollo relativamente reciente con un futuro prometedor para hacer posible la interacción segura hombre-máquina. Al permitir una colaboración directa entre un trabajador y un robot, están agregando una dimensión a nuestra comprensión de cómo se puede integrar la automatización en la industria. Un cobot puede ser un robot articulado, cartesiano, SCARA o delta. Aunque, hasta la fecha, la mayoría se clasificaría como articulado. Vienen con una capacidad de carga útil de 4-35 kg, aumentando de tamaño y alcanzando (también el precio) en consecuencia. Hay modelos con hasta siete ejes; este último puede realizar tareas que son particularmente desafiantes ergonómicamente. Los Cobots incluso se están utilizando como robots de línea de producción independientes.
Haciendo su elección
Al abordar una inversión en robótica, uno debe considerar todos los aspectos de una aplicación antes de hacer una selección final. Estos son algunos de los factores más importantes a tener en cuenta:
· El alcance y la carga útil deben ser los primeros criterios considerados en el proceso de selección de su robot, ya que estos factores pueden acortar inmediatamente la lista de opciones adecuadas. Por ejemplo, una carga grande y pesada descartaría cualquier consideración de tecnologías de manejo livianas. Por otro lado, si el alcance es largo pero el peso de la carga útil es bajo, un robot cartesiano de menor costo podría ser suficiente.
· Flexibilidad. En una aplicación que requiere cinco o seis grados de libertad, un robot articulado puede ser la única solución viable. Si es así, una opción para el negocio sensible al precio que requiere uno o dos robots podría ser unidades reutilizadas (usadas). Sin embargo, para aplicaciones más simples, como posicionamiento y carga de piezas pequeñas, inserción electrónica de piezas y carga de cajas y máquinas herramienta, cualquier aplicación donde dos o tres ejes sean suficientes, ¿por qué pagar más ejes de los que requiere la aplicación?
· Velocidad. ¿Requiere la aplicación una alta tasa de selección, como la de un robot delta, o sería suficiente una menor tasa de selección de pórtico cartesiano o robot SCARA?
· Espacio y huella. Cada vez más, las huellas de máquinas y líneas de producción son preocupaciones clave de planificación. El espacio en el piso es costoso, y las empresas quieren optimizar el diseño de su planta. Los robots cartesianos y delta proporcionan una clara ventaja sobre las otras tecnologías, ya que solo se pierde espacio vertical, que generalmente es menos crítico.
· Ingeniería y Desarrollo de Proyectos. El tiempo y los gastos de diseño, montaje, instalación y puesta en servicio deben tenerse en cuenta en el coste comparativo, especialmente incorporando un robot en una máquina o sistema más grande. Los retrasos en la recepción y montaje del robot podrían retrasar todo el proyecto.
· Mantenibilidad, reparabilidad y disponibilidad. El tiempo de inactividad no programado es la pesadilla de cada gerente de producción. Los robots deberían ser relativamente fáciles de mantener y reparar.
· La estandarización dentro de una empresa o industria podría ser una consideración válida por motivos comerciales, incluso si el robot seleccionado no es el más adecuado o incluso el más barato, pero capaz de hacer el trabajo. A veces, el camino bien recorrido demostrará ser el de menor resistencia (y riesgo).
La proliferación de tecnologías de robots ha permitido a las empresas de todos los tamaños acceder a los beneficios de la automatización. El mejor robot para usted suele ser el que mejor se adapte a su aplicación, no solo para lograr las ganancias de productividad de la inversión y satisfacer los requisitos técnicos de la aplicación, sino también desde el punto de vista de cuestiones relacionadas como la seguridad de la planta, la utilización del espacio y, por supuesto, el costo inicial y el soporte postventa.