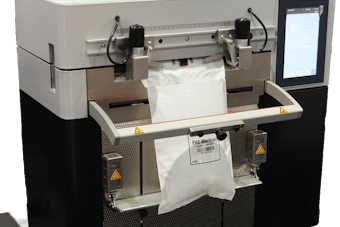
En el estand de Douglas Machine, un equipo en exhibición especialmente intrigante fue el TriVex®SL para carga superior, una máquina diseñada específicamente para posicionar bolsas en cajas listas para la venta. Según Steve Lipps, director sénior de producto, el enfoque adoptado con esta máquina es similar al de otros sistemas robóticos de Douglas, como el multiempacador de envoltura retráctil theContour de la serie 60. Un robot SCARA hecho por Douglas es implementado de manera que simplifica el diseño de la máquina al eliminar la necesidad de un controlador de robot separado así como la necesidad de mecanismos adicionales. Los controles son todos de Rockwell.
"Sí, es un robot SCARA, pero tiene el controlador ControLogix de Rockwell, el Panel de visión de Rockwell como interfaz hombre máquina, y las unidades y motores Rockwell", dice Lipps. "Nos beneficiamos porque el diseño de la máquina es simplificado, pero nuestros clientes disfrutan de beneficios más significativos porque la complejidad desaparece, el espacio en planta se minimiza y ya están acostumbrados a los controles de Rockwell".
Operando a una velocidad de hasta 25 cajas por minuto y adecuado para vegetales congelados, mezclas de panadería y productos de confitería, la máquina cuenta con dos robots, cada uno equipado con un efector final tipo cubo. Cada robot se posiciona frente a un transportador de alimentación para recibir el número apropiado de bolsas y entonces gira para depositar las bolsas dentro de una caja que está en espera mientras otro robot posiciona el cubo. Si es necesario, el cubo del efector del extremo puede ser reemplazado por un efector de extremo que puede ser reemplazado por un efector de extremo con copa de succión para la recolección.